
Design of VR games for wrist joint rehabilitation of stroke patients
2023-2024
Xinwen.Zhang Yuze. Li
Hanlin.Cao Yan.Wei
Jiadong.Shen
Project Background and Objectives
Background: The aging population has led to an increase in the number of stroke patients, while there is a shortage of rehabilitation doctors. Existing wrist rehabilitation games have problems such as insufficient appeal, limited dimensions, and defective equipment and algorithms.
Objectives: Complete the prototype within six weeks and optimize it iteratively to create a system integrating rehabilitation training and assessment, assisting patients in rehabilitation and reducing the medical burden.
Design Concepts and Solutions
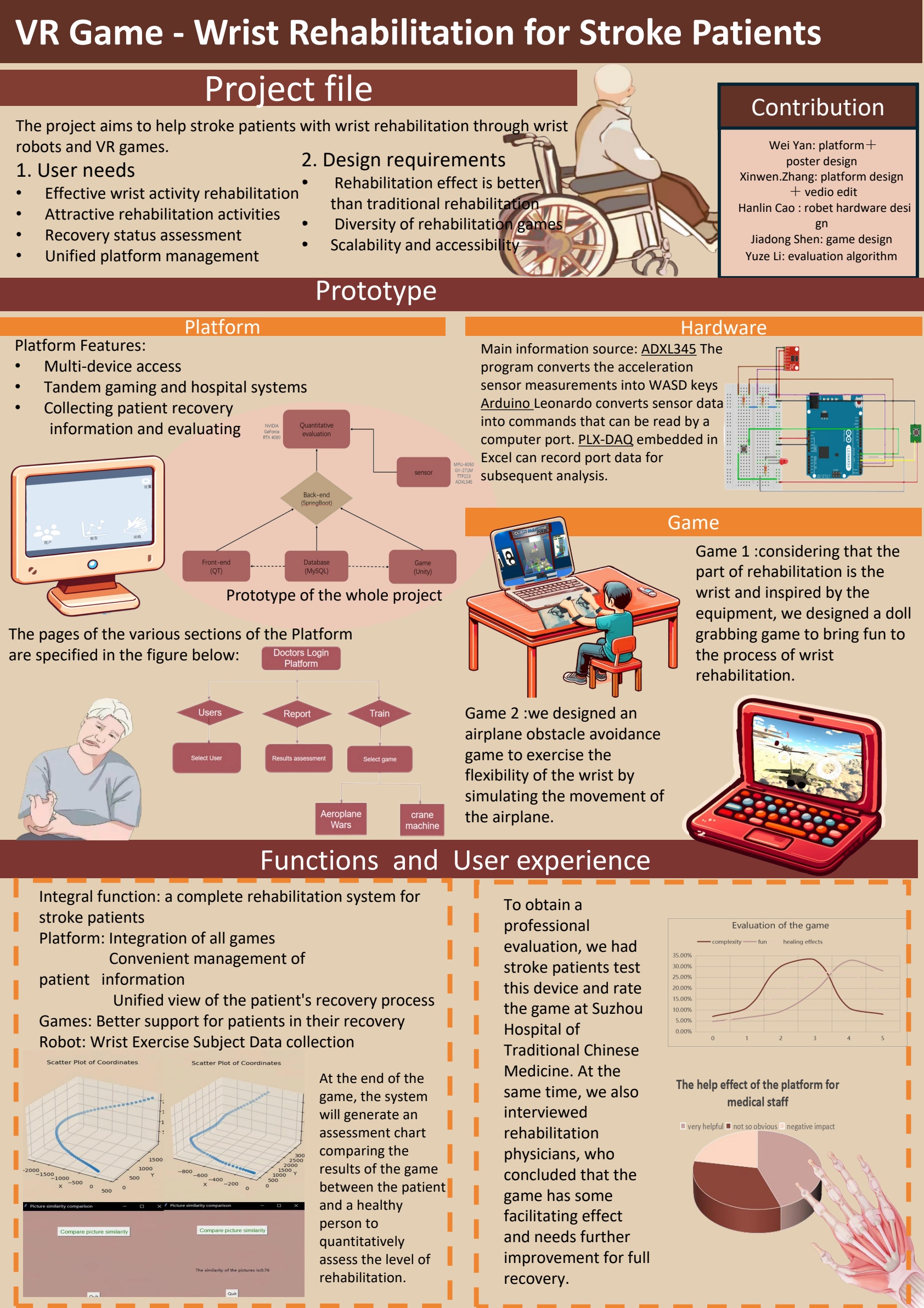
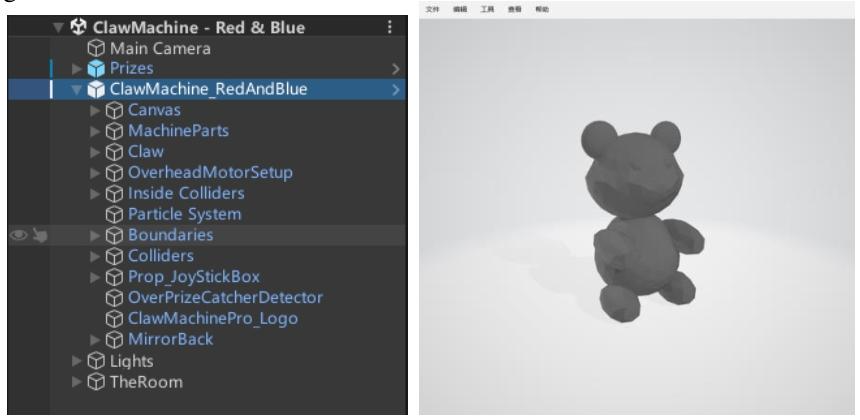
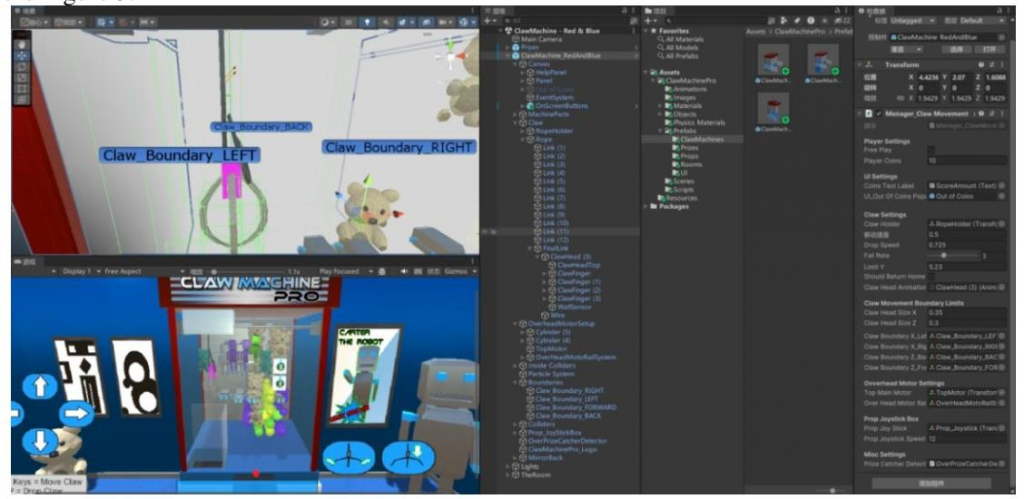
Game Design: Proposed ideas such as claw machine rocker, airplane joystick, and mahjong machine, and the first two were determined after screening. The games were developed using the Unity engine, considering compatibility and cross-platform capabilities, and an incentive mechanism was built to enhance patients’ enthusiasm.

Platform Design: The QT framework and C language were selected for development to ensure efficiency and reliability. The interface design was benchmarked against medical robots to optimize the user experience. The patient’s rehabilitation status was evaluated by comparing the sensor data with the standard trajectory.
Hardware Design: The wrist rehabilitation robot from the Suzhou Institute of the National University of Singapore and the ADXL345 acceleration sensor were used. After circuit debugging and algorithm optimization, the Arduino Leonardo was used to control the cursor movement (later changed to simulate keyboard output), and the PLX-DAQ was used to export data.
Prototype Production and Testing
Game Production: The claw machine game built sophisticated models and logic, and the reward mechanism inspired patients’ interest. The airplane obstacle avoidance game created various models and scenes and improved the operation and collision logic.
Platform Construction: The platform was built with QT as the core, covering functional modules such as login, registration, user management, game selection, and report generation. Each module worked in an orderly manner through division of labor and cooperation.
Testing and Optimization: Initially, using the robot’s angle data for training was ineffective. Later, the acceleration sensor was used to collect data. After processing by the VAE algorithm (abandoned due to problems), the trajectory similarity was finally used to evaluate rehabilitation, and the cosine similarity calculation was used to improve the accuracy and timeliness of the evaluation.
Project Reflection and Improvement
User Feedback: A hospital survey showed that more than 80% of healthcare professionals recognized the platform, but it still needs to be optimized and improved.
Problem Discussion: There were poor communications between Unity and the database, and between QT and Unity. The PLX-DAQ had poor integration, and the evaluation algorithm had limitations.
Future Directions: Optimize the game, algorithm, platform, and database design, enhance the application of VR technology, and improve the rehabilitation effect and user experience.
Project Summary and Impact
Product Effectiveness: Provide an effective tool for wrist rehabilitation of stroke patients, receive positive feedback, and promote the rehabilitation process.
Multiple Values: Consider the differences of patients, reflect equality and inclusion, reduce the burden on families and doctors, and contribute to environmental protection.
Team Collaboration: Members from multiple disciplines cooperated, divided work according to their majors, and ensured the progress of the project.