
Bio-Inspired Spider-Like Robot for Environmental Detection
2022-2023
Bowen.Gu Xingyu.Chen
Zhen.Qiu Jiawei.Tan
Mingtian.Tan
Project Background and Objectives
Background: Traditional wheeled robots have many disadvantages in the field of environmental monitoring, such as difficulty in moving in complex terrain and narrow spaces, and being easy to damage the environment. A questionnaire survey of more than 50 people found that users expect robots to move flexibly, monitor the environment in real time, and be easy to operate.
Objectives: To develop a robot with better biological intuition to meet the detection needs in different environments, obtain accurate environmental data, and achieve convenient operation and effective data transmission.
Design Concepts
Mechanical Structure and Circuit Design
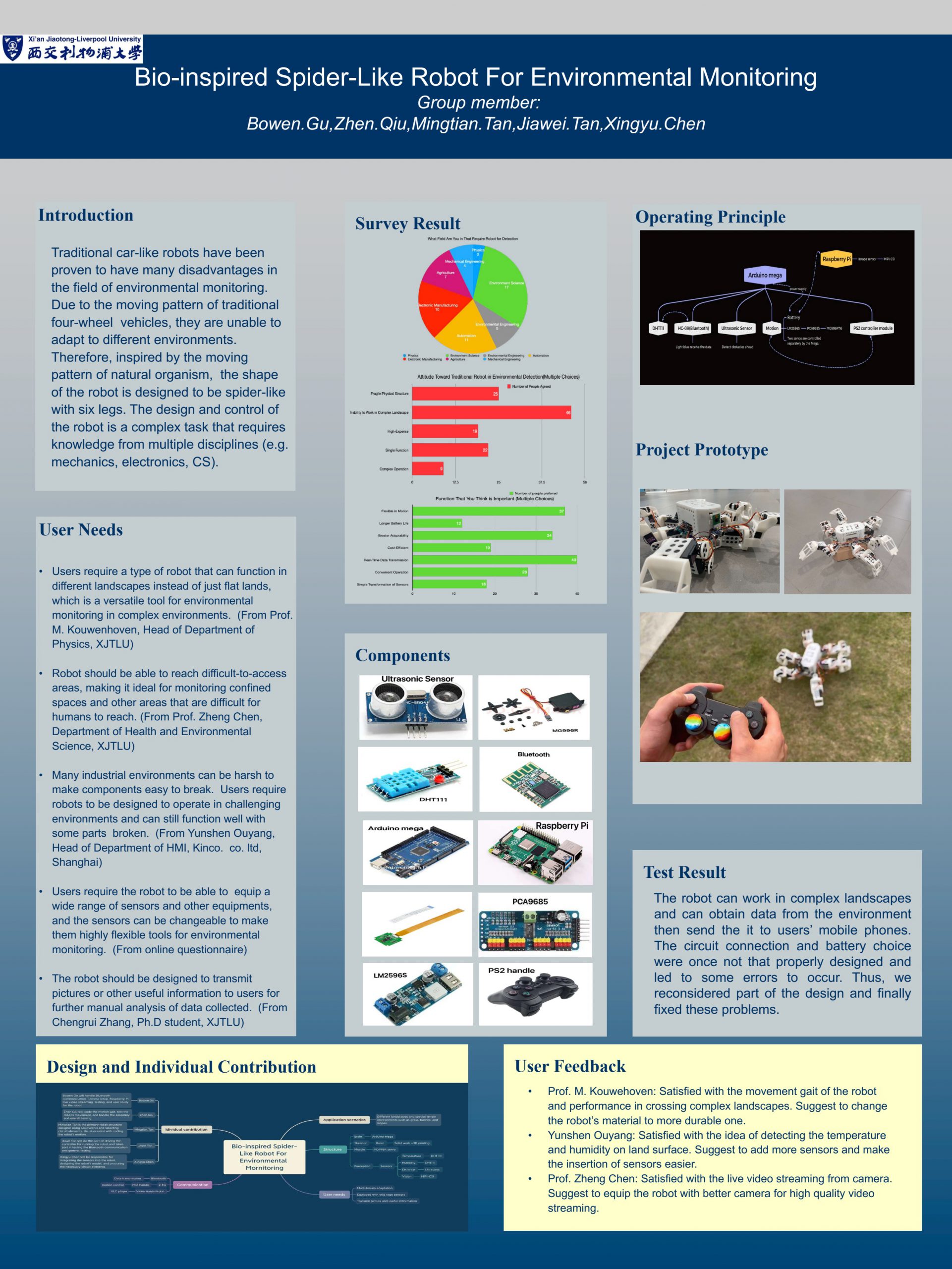
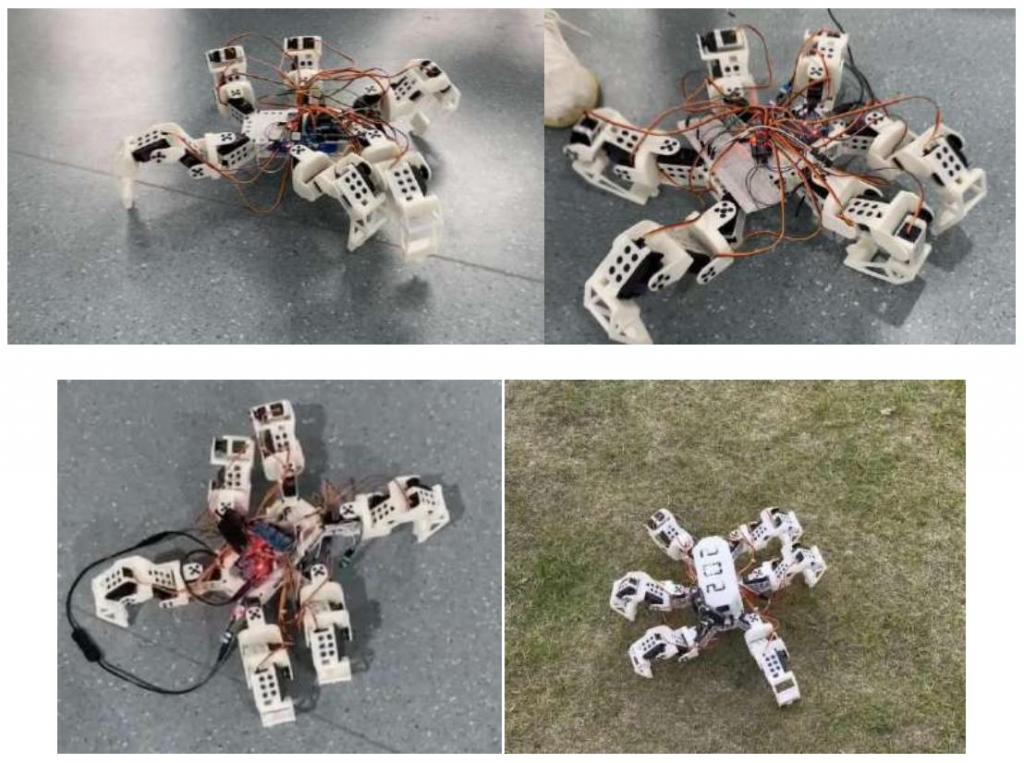
Mechanical Structure: The robot has six legs, each with three joints. A specific structural design is adopted to ensure stability and flexibility. The fuselage has two layers and is provided with many holes to reduce weight. The whole is made of lightweight and corrosion-resistant materials.
Complete enginnering drwing shows in A ppendix
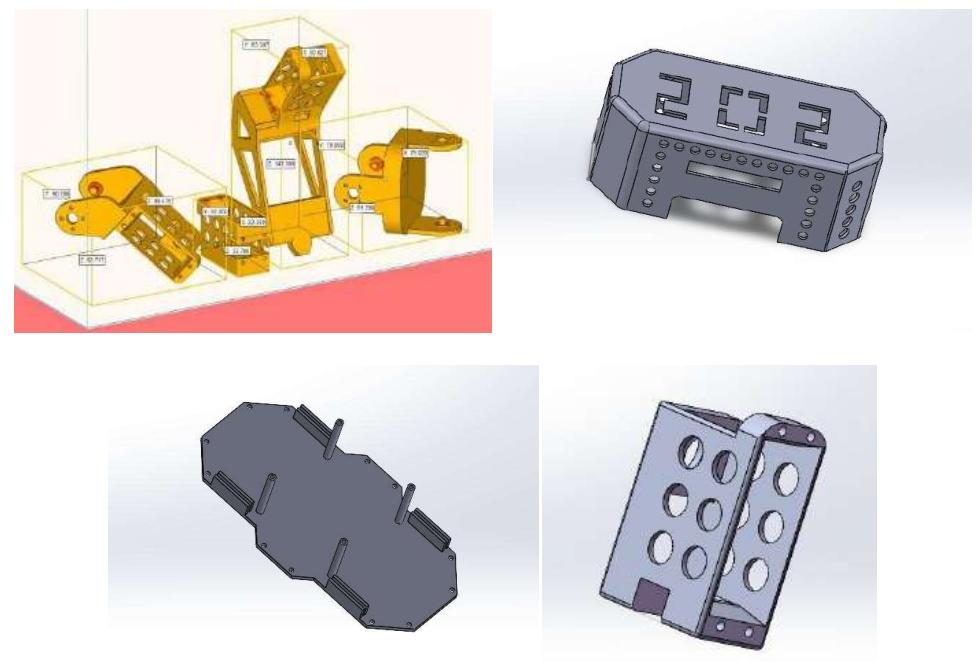
Circuit Design: Since 18 servos and various sensors need to be controlled, a 16-channel PWM expansion board is selected to assist the Arduino Mega 2560 to control the servos. The pin connection and power supply method are described in detail.
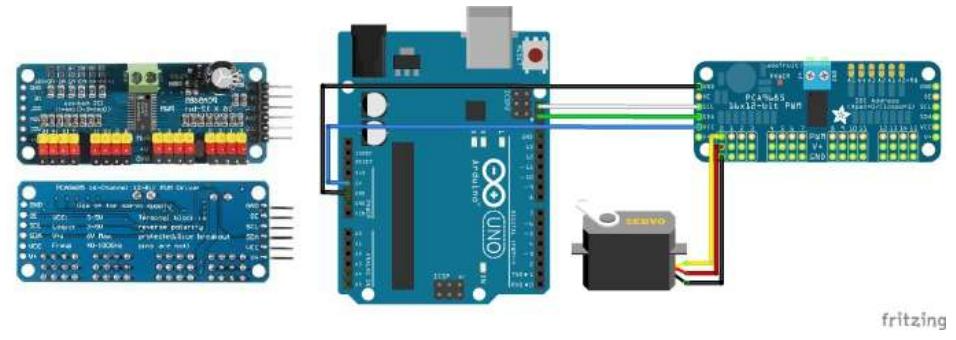
Motion Gait Design: The movement of insects is studied, and six basic motion gaits including forward, backward, lateral movement and turning are designed. They are realized by sending different instruction groups to 18 servos. For example, the tripod gait is used to realize the forward movement in four steps in a cycle.
Sensor Design
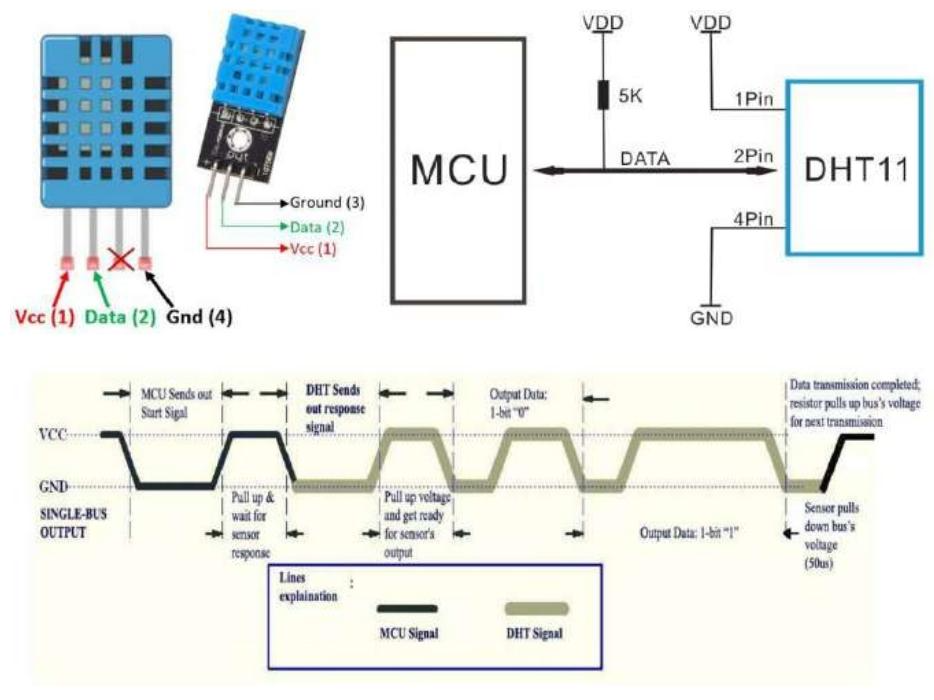
Temperature and Humidity Sensor (DTH – 11): Placed on the robot close to the ground, it can monitor the environmental temperature and humidity with high precision and transmit data to the mobile phone via Bluetooth 5.0 every two seconds.
Ultrasonic Sensor (HC – SR04): It is used as a danger alarm and motion feedback controller to enhance the environmental adaptability and safety of the robot.
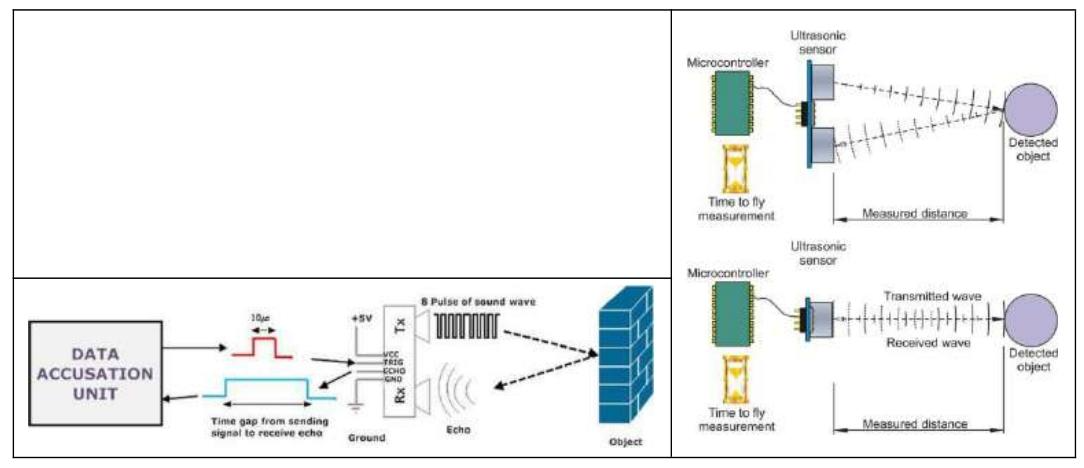
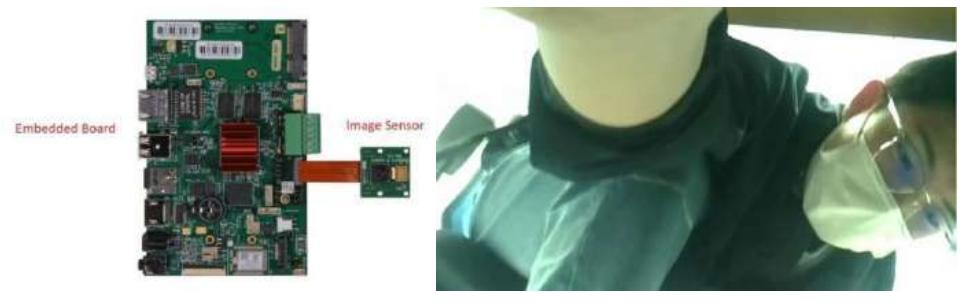
Image Sensor (MIPI – CSI): The camera on the robot’s head is controlled by Raspberry Pi, and high-speed transmission of image and video data is realized through the MIPI – CSI interface to meet the user’s demand for real-time environmental monitoring.
Communication Design
Bluetooth (HC – 09): Realize the real-time data transmission between the robot and the mobile phone. Users can remotely obtain environmental information. The communication frequency, protocol, baud rate and other parameters and connection methods are introduced.

PS2 Joystick: It is used to conveniently control the movement of the robot. Its receiver is connected to Arduino, and each button corresponds to different movement instructions. The signal can be decoded by open source code to achieve control.

Prototyping and Testing
Production Method: Write code on Arduino Mega and Raspberry Pi to realize functions such as motion gait, obstacle avoidance, remote control and machine vision. The servo control code and the principle of realizing motion gait are described in detail, such as the order of servo actions in different gaits.
Testing Plan: In response to users’ requirements for the robot’s flexible movement, long endurance, wear-resistant materials and good user experience, testing plans are formulated respectively, such as testing the movement ability in different environments, testing the endurance and stability through long-term operation, and collecting user feedback through trials.
Testing Results
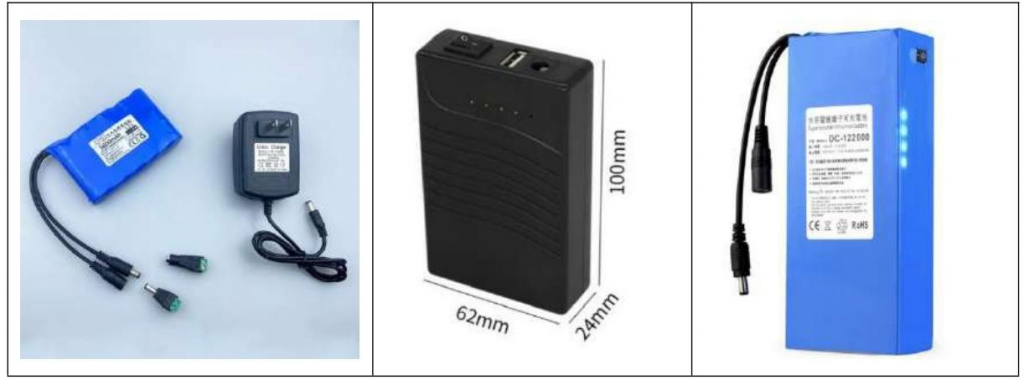
Self-Testing Problems and Solutions: Problems occurred in the connection of components with different voltages in the circuit design. For example, some components were damaged due to voltage or current changes. They were solved by adding switches, optimizing the connection and replacing the battery; the original battery design had potential safety hazards and insufficient power supply. Finally, a polymer lithium battery was selected.
User Testing Feedback: The professor of the Department of Physics of Xi’an Jiaotong-Liverpool University affirmed the robot’s movement ability on complex surfaces and suggested using more durable materials and sustainable power supply methods; a senior engineer of an automation company recognized the temperature and humidity measurement function and proposed to enhance the sensors and standardize the interfaces and codes; the professor of the Department of Health and Environmental Science of the university believed that the robot was suitable for plant monitoring and suggested upgrading the camera.
Project Summary
Design Advantages: It brings new possibilities for environmental monitoring. The gait can be optimized, the structure and sensors can be adjusted, and it has little impact on the environment and strong compatibility.
Environmental and Social Impacts: It is environmentally friendly and can promote social change, reduce labor demand, improve efficiency, ensure safety and promote.