
Intelligent Pickup Tennis Robot Based on Image Recognition
2023-2024
Haifeng.Su Haoyu.Hu
Wenqing.Liu Zhuoyuan.Zhang
Zheng.Gong
Project Background and Objectives
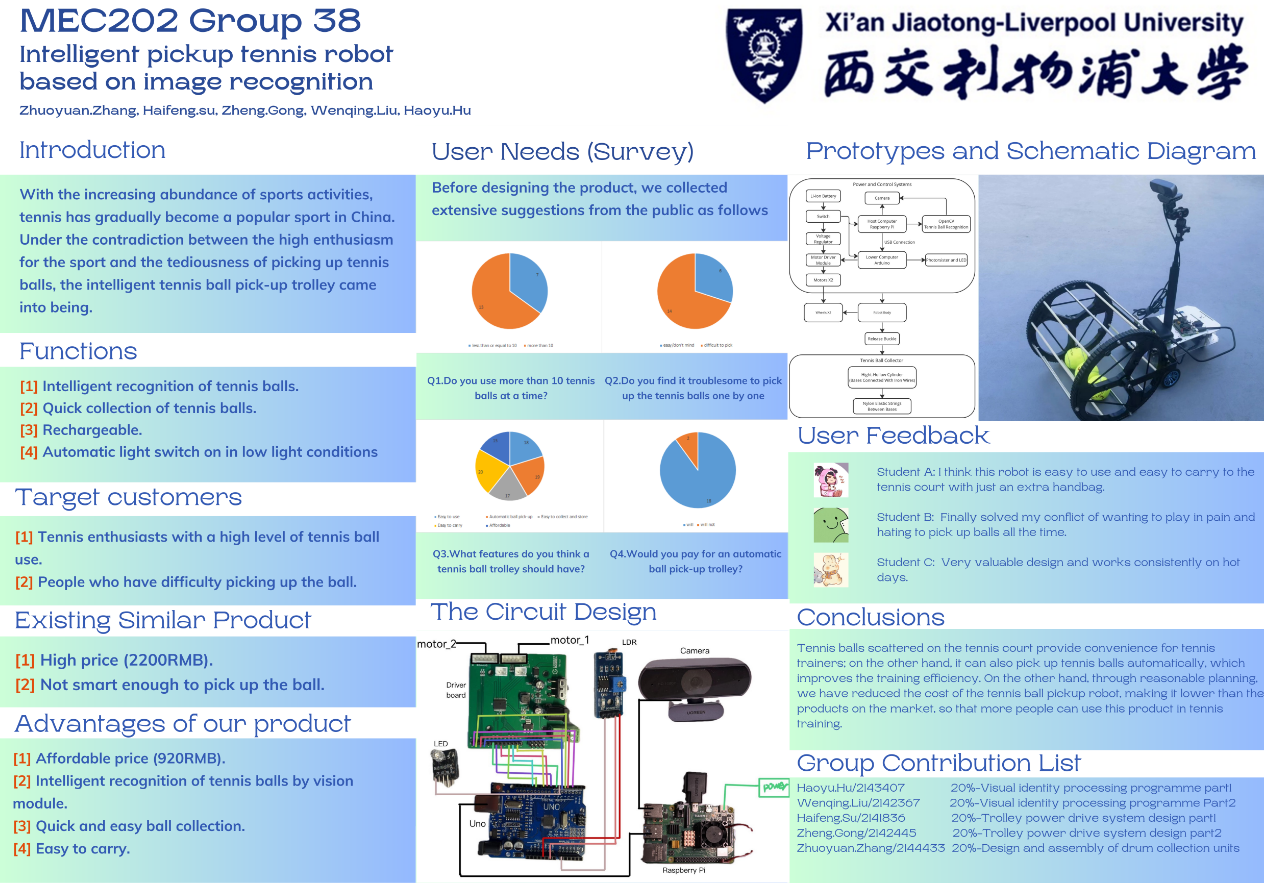
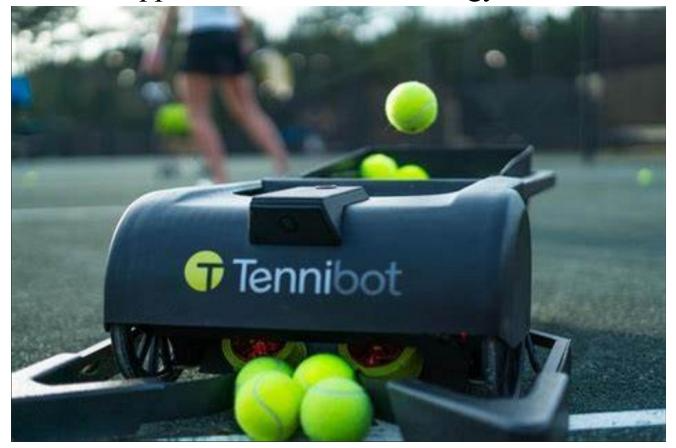
Background: The popularity of tennis has been increasing, but the ball-picking work is time-consuming and laborious, affecting the sports experience. The existing tennis ball-picking robot like Tennibot is advanced in technology but expensive.
Objectives: To develop an intelligent tennis ball-picking robot with lower cost and optimized performance, improve the efficiency of tennis training and competition, and promote the intelligent development of tennis.
Design Concepts and Screening
Trolley Module: Initially, a tracked chassis was chosen, but later it was changed to a double-layer aluminum alloy frame due to insufficient friction and chassis size problems. The new frame has the advantages of light weight, high strength, large space, and easy processing.

Motor Module: A 520 encoder motor (reduction ratio 90, rated torque 10kg⋅cm) was selected, which can provide strong driving force and precise control. However, due to the insufficient computing power of the Arduino Uno development board, the four-wheel drive was changed to two-wheel drive (one universal wheel).

Motor Drive Module: The TB6612 two-channel motor driver was adopted, which supports motor speed and direction control, is easy to use and has good compatibility, and can simplify wiring and power the Arduino.
Arduino uno Board Module: Arduino Uno is easy to program but has limited computing power. Therefore, it is combined with Raspberry Pi to complete the project tasks by leveraging their respective advantages.
Tennis Ball Collection Module: A drum-like structure was used, with rubber wheels installed on both sides to prevent the balls from falling out. The metal rod in the center was replaced with a wooden rod to reduce weight, and tape was wrapped around it to improve stability.

Vision Module: After evaluation, OpenCV and Raspberry Pi were selected to build the vision system, along with a high-resolution USB camera, because of their better performance in recognition speed, algorithm range, and cost-effectiveness.
Prototyping and Testing
Prototyping: The Raspberry PI is used as the upper computer to recognize tennis balls through a monocular camera and OpenCv, and control the Arduino uno of the lower computer to drive the motor. A double-layer car structure is adopted, and a photoresistor is added to control the LED to facilitate finding the vehicle in a dark environment.
Testing Contents
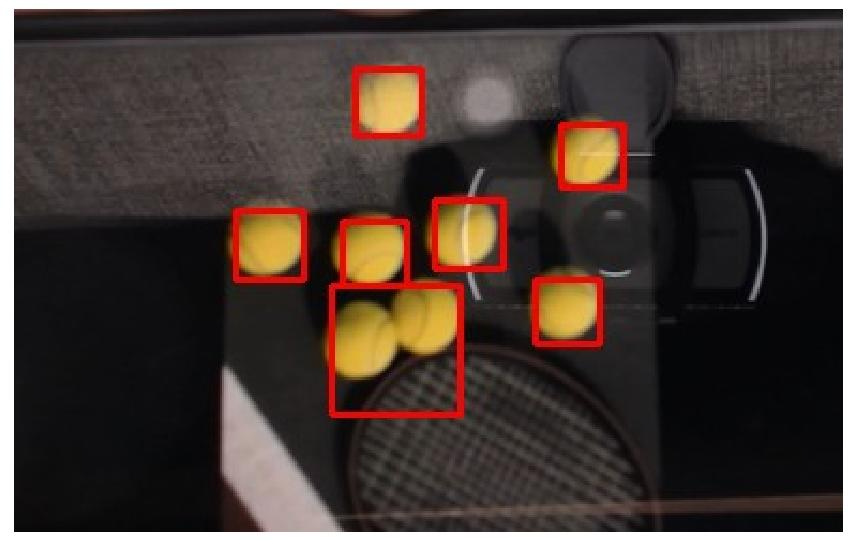
Court Ball Identification Test: An algorithm was used to convert the video to the HSV color space to identify tennis balls, and the test was successful on a laptop computer. The serial communication test was also completed.
Encoder Motor Adjustment Test: The PID parameters were adjusted to make the motor speed close to the expected value. However, due to the computing power problem of Arduino uno, the vehicle still deviated when driving in a straight line. Later, the problem was improved by PWM adjustment.
Ball Finding Test: A function of rotating to find the ball when there is no ball in sight was added. After adjusting the parameters and program, it can be realized. However, due to the limitation of the camera’s field of view, a strategy of moving forward for two seconds to hold the found ball and then finding the target was adopted, and a 30-second idle automatic shutdown function was added. At the same time, the communication delay problem between Raspberry PI and Arduino was solved.


Photoresistor-controlled LED Car-finding Test: A photoresistor was added to control the LED, and it can work normally in a dark environment.
Collection Device Improvement Test: The weight of the collection device was reduced, the design of the ball rod was improved, and the installation direction was adjusted to improve the movement performance and collection efficiency of the robot.
Control Program Explanation: The functions of the main functions in the control program for tennis ball recognition, drawing marks, finding the nearest ball, and calculating control commands were introduced.
User Feedback and Improvement Directions
User Feedback: Teachers thought that the vision recognition solution was better than the traditional remote control method, and the automatic night-time switching function was practical. Students recognized that it could meet daily needs, but suggested improving the ball pickup structure to a snap type, reducing the weight and volume, and also pointed out the problem of misidentification.
Improvement Directions: Optimize the vision recognition algorithm, improve the structural design, and conduct lightweight design to improve the performance and user experience of the robot.
Project Summary
Product Conclusion: The intelligent tennis ball-picking robot can automatically pick up balls through vision recognition technology, has low cost and reliable functions, can improve training efficiency, and has economic and use values.
Project Reflection: The project has received feedback in terms of professionalism, practicality, portability, and accuracy. Future improvements will be made accordingly to promote the efficiency and convenience of tennis training.